Modelo de atunero de los años 50, siglo XX
Encontré en internet el número 173 de la revista Ingeniería Naval de noviembre de 1.949, en la que un artículo […]
Encontré en internet el número 173 de la revista Ingeniería Naval de noviembre de 1.949, en la que un artículo […]
(escala 1/140) A mis colegas de afición, con respeto. Creo haber dicho ya que mi etapa de modelista naval ha
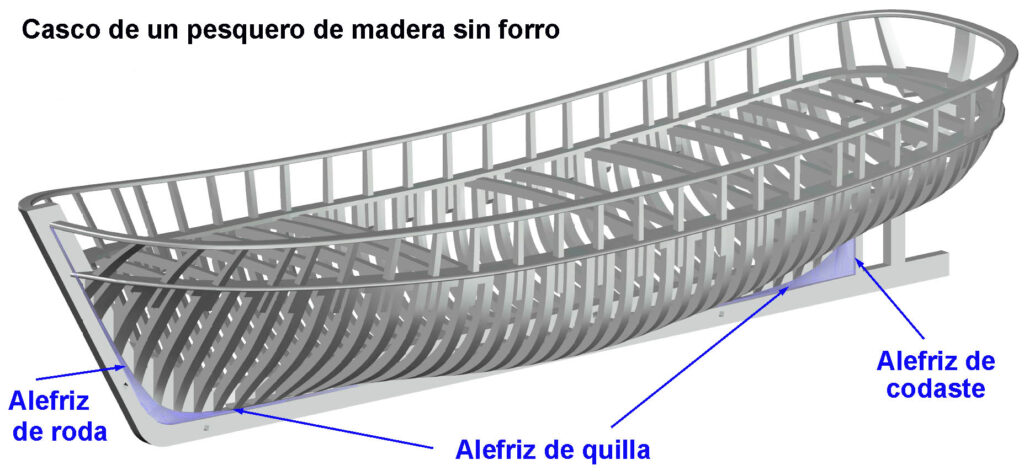
Con el nombre genérico de pesquero del Cantábrico, se conoce a un conjunto de embarcaciones construidas en madera que, durante
Al contrario que otras, desde mi infancia, nunca me ha abandonado la afición a los barcos y, en general, a
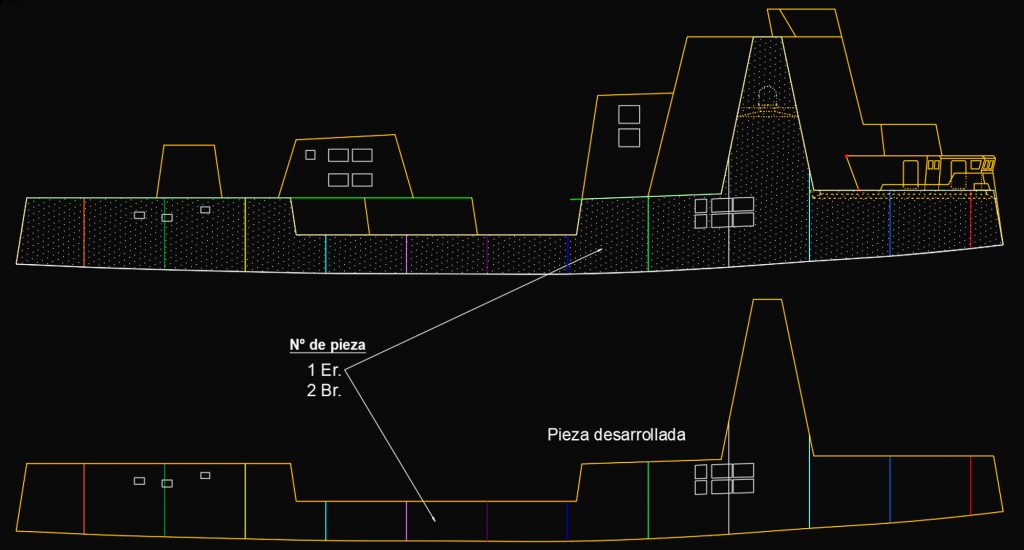
Viene de: https://ganandobarlovento.es/modelismo-naval-descripcion-de-mi-metodo-de-diseno-de-un-modelo-de-fragata-tipo-f-100-ii/ El diseño de la superestructura del modelo de fragata F – 100 ha seguido el mismo método

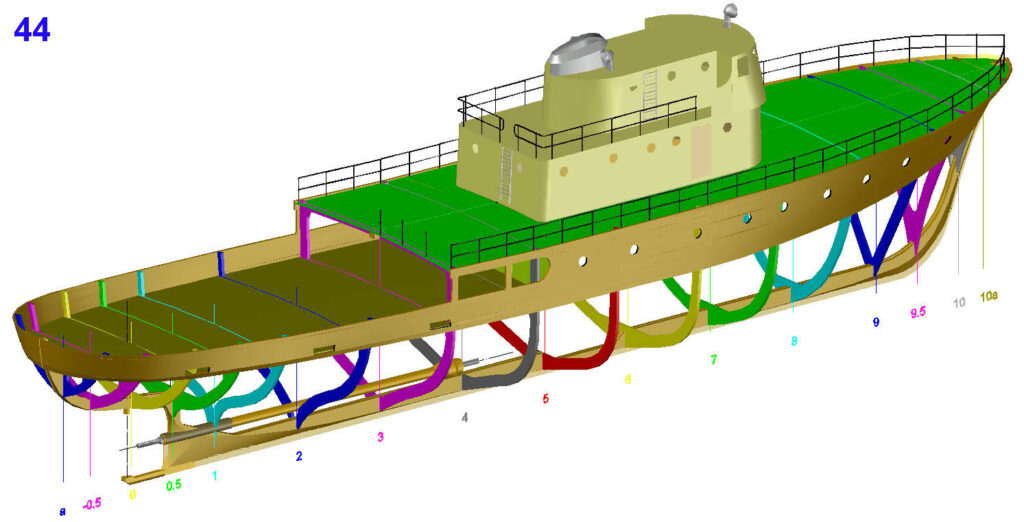
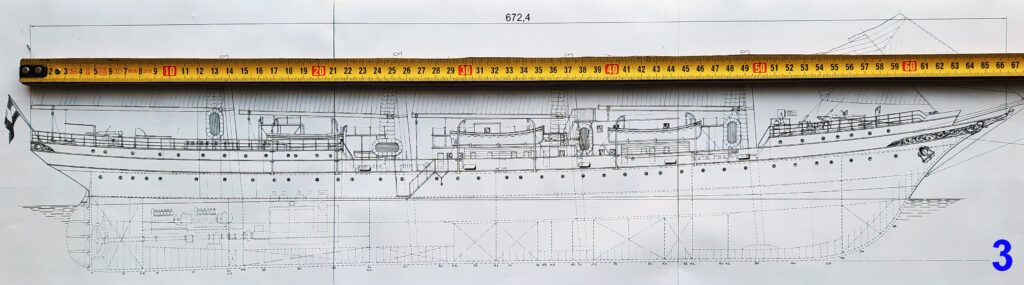
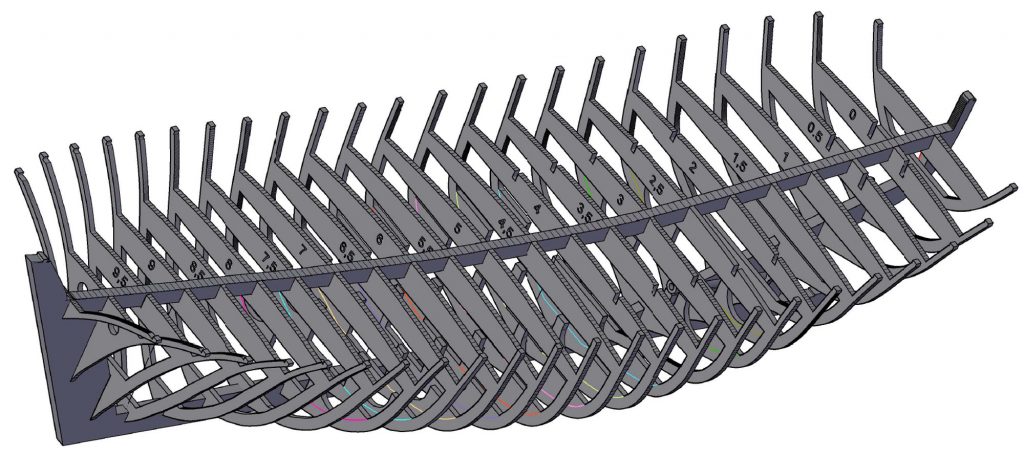
Viene de: https://ganandobarlovento.es/ La primera parte de este relato es la descripción del método de confección del plano de formas